Neuromorphic Intelligence for
Anthropomorphic Robots (Applied Domain)
~Event‑Driven Perception and Distributed Motor Intelligence~
Principal Investigators: Abderazek Ben Abdallah (PI), Zhishang Wang (PI)
 We investigate
next‑generation adaptive distributed
autonomous systems through the lens of
anthropomorphic prosthetics, androids, and
intelligent robotic platforms. Our research
integrates cutting‑edge neuroscience,
artificial intelligence, neuromorphic
computing, and robotics to create highly
responsive, lifelike systems capable of
operating autonomously while adapting to human
intent and dynamic environments. Leveraging
neuromorphic architectures and spiking neural
networks, we develop control frameworks that
enable natural, intuitive interaction between
artificial limbs, androids, and biological
systems. These brain‑inspired models support
real‑time adaptation, low‑power operation, and
seamless communication across distributed
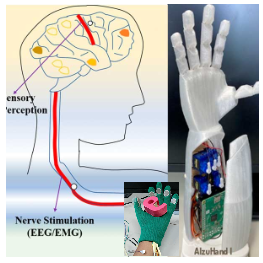
components. Our work on non‑invasive neural
interfaces allows prosthetic devices to adjust
continuously to user intent, improving
precision, comfort, and fluidity of motion. In
parallel, our research on advanced sensory
processing equips androids with human‑like
perceptual capabilities, enabling them to
interpret complex environmental stimuli,
collaborate with humans, and function
autonomously within distributed multi‑agent
settings. We investigate
next‑generation adaptive distributed
autonomous systems through the lens of
anthropomorphic prosthetics, androids, and
intelligent robotic platforms. Our research
integrates cutting‑edge neuroscience,
artificial intelligence, neuromorphic
computing, and robotics to create highly
responsive, lifelike systems capable of
operating autonomously while adapting to human
intent and dynamic environments. Leveraging
neuromorphic architectures and spiking neural
networks, we develop control frameworks that
enable natural, intuitive interaction between
artificial limbs, androids, and biological
systems. These brain‑inspired models support
real‑time adaptation, low‑power operation, and
seamless communication across distributed
components. Our work on non‑invasive neural
interfaces allows prosthetic devices to adjust
continuously to user intent, improving
precision, comfort, and fluidity of motion. In
parallel, our research on advanced sensory
processing equips androids with human‑like
perceptual capabilities, enabling them to
interpret complex environmental stimuli,
collaborate with humans, and function
autonomously within distributed multi‑agent
settings. |
|
AIzuHand Prosthetic
Prototypes Visit AIzuHand Project
Site →

AIzuHand I 
AIzuHand H 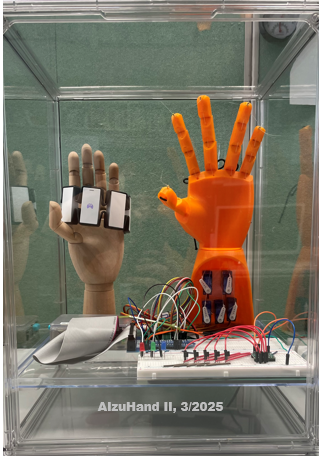
AIzuHand II |
|
NHURO Nexus:
Neuromorphic Humanoid Robot
  |
|
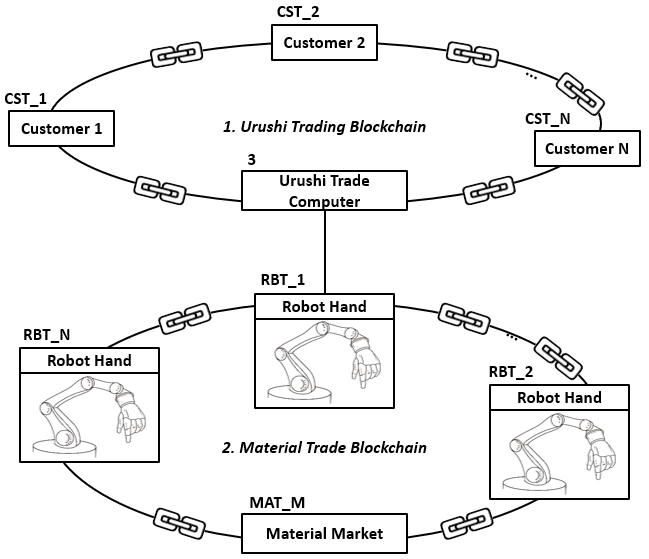
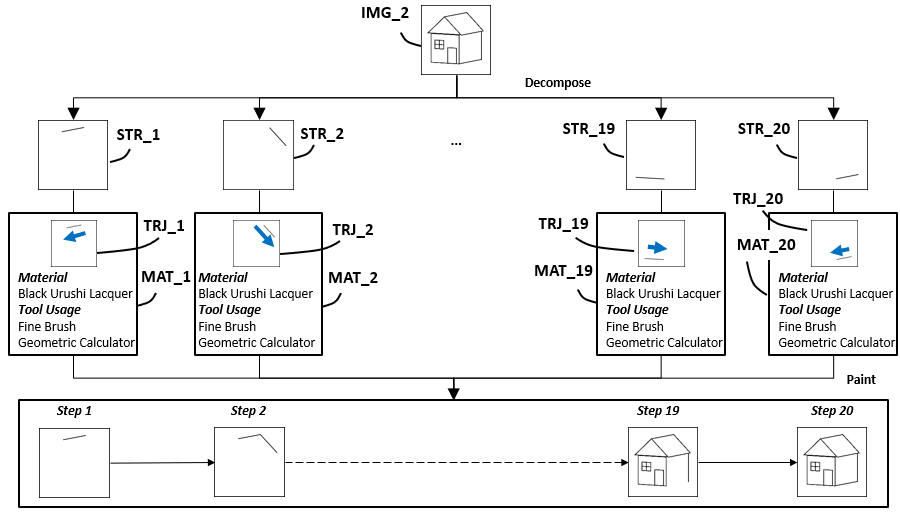
Self-Controlled Urushi
Painting Anthropomorphic Robot System
  |
|
Related Publications
Related Patents:
|